ROS控制编程: 从入门到精通
ROS(Robot Operating System)是一个灵活的框架,用于编写机器人软件。ROS的控制编程是实现机器人动作、运动和感知的核心部分。无论您是想要构建自己的机器人还是在现有的机器人系统上进行开发,掌握ROS控制编程都是必不可少的。在本文中,我们将深入探讨ROS控制编程的基础知识,并提供一些实用的指导建议,帮助您在这个领域取得成功。
1. ROS控制基础
在开始ROS控制编程之前,您需要了解以下基础概念:
节点(Nodes)
:ROS系统由多个节点组成,每个节点都是一个执行特定任务的进程。节点之间通过ROS话题进行通信。
话题(Topics)
:话题是节点之间进行通信的方式。节点可以发布(Publish)消息到一个话题,也可以订阅(Subscribe)来自话题的消息。
消息(Messages)
:消息是在ROS节点之间传递的数据单元。ROS提供了许多标准消息类型,如`std_msgs/String`和`geometry_msgs/Twist`等。
服务(Services)
:服务允许节点请求某种特定操作,并等待该操作的完成。服务由一个请求消息和一个响应消息组成。
动作(Actions)
:动作是一种高级别的通信机制,用于执行长时间运行的任务。动作由一个目标消息、一个结果消息和一个反馈消息组成。2. ROS控制软件包
ROS提供了许多用于机器人控制的软件包,其中一些最常用的包括:
ros_control
:提供了一个通用的机器人控制框架,包括关节控制器、传感器接口和硬件接口。
moveit
:用于运动规划和控制的软件包,适用于各种类型的机器人。
gazebo_ros_pkgs
:用于在Gazebo仿真环境中模拟和测试ROS控制器的软件包。3. ROS控制编程实践
下面是一些ROS控制编程的实践步骤:
安装ROS控制软件包
:首先确保您的ROS安装包含所需的控制软件包,如果没有,您可以使用ROS包管理器进行安装。
配置机器人描述
:使用URDF(Unified Robot Description Format)或者SRDF(Semantic Robot Description Format)描述您的机器人,包括关节结构、连杆长度和传感器信息。
编写控制器配置文件
:根据您的机器人配置编写控制器配置文件,定义关节控制器、传感器接口和硬件接口。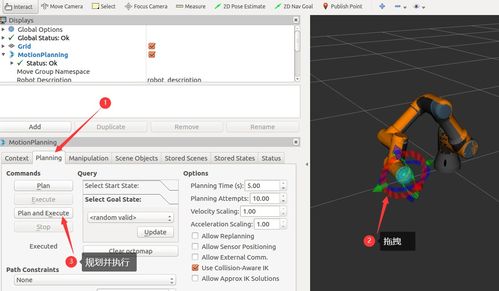
启动控制器
:创建一个启动文件,加载您的控制器配置,并启动ROS控制器。
测试控制器
:使用ROS工具(如`rostopic`和`rviz`)或者仿真环境(如Gazebo)测试您的控制器,确保其正常工作。4. ROS控制编程的挑战和建议
尽管ROS控制编程提供了许多便利,但在实践中仍然会遇到一些挑战。以下是一些应对这些挑战的建议:
理解机器人动力学
:深入了解机器人的动力学模型,包括惯性、摩擦和关节限制,这对于设计有效的控制器至关重要。
调试和优化控制器
:在调试和优化控制器时,使用ROS提供的工具进行实时可视化和数据记录,以便及时发现和解决问题。
考虑实时性
:对于需要实时响应的应用,确保您的控制器设计能够满足实时性要求,避免延迟和不稳定性。
持续学习和社区参与
:ROS社区提供了丰富的文档、教程和示例,不断学习最新的技术和最佳实践,并积极参与社区讨论,分享经验和解决方案。结论
ROS控制编程是实现机器人动作、运动和感知的重要组成部分。通过掌握ROS控制基础知识,使用ROS提供的控制软件包,以及实践控制编程的步骤和建议,您可以有效地开发和调试机器人控制器,实现各种复杂任务的自动化。
无论您是初学者还是有经验的开发人员,都应该不断学习和探索ROS控制编程领域,将其应用于实际项目中,推动机器人技术的发展和创新。
版权声明
本文仅代表作者观点,不代表百度立场。
本文系作者授权百度百家发表,未经许可,不得转载。